01
Highlights
1. High rhythm and high precision
The fastest standard cycle time can reach 0.38 s, and the robot positioning accuracy can reach 0.025 mm.
2. High rigidity and low vibration
Robot body mode and rigidity enhancement, combined with vibration suppression and active vibration suppression functions, effectively reduce vibration.
3. Easy to maintain and scalable
The detachable structure of cables and batteries allows for the replacement of robots inside the device, and the built-in camera network cable enables various communication extensions.
02
Applications
It can be used in handling, sorting, assembly, etc.
03
Industries
Suitable for industries such as electronic manufacturing, lithium batteries, automotive electronics, and photovoltaics.
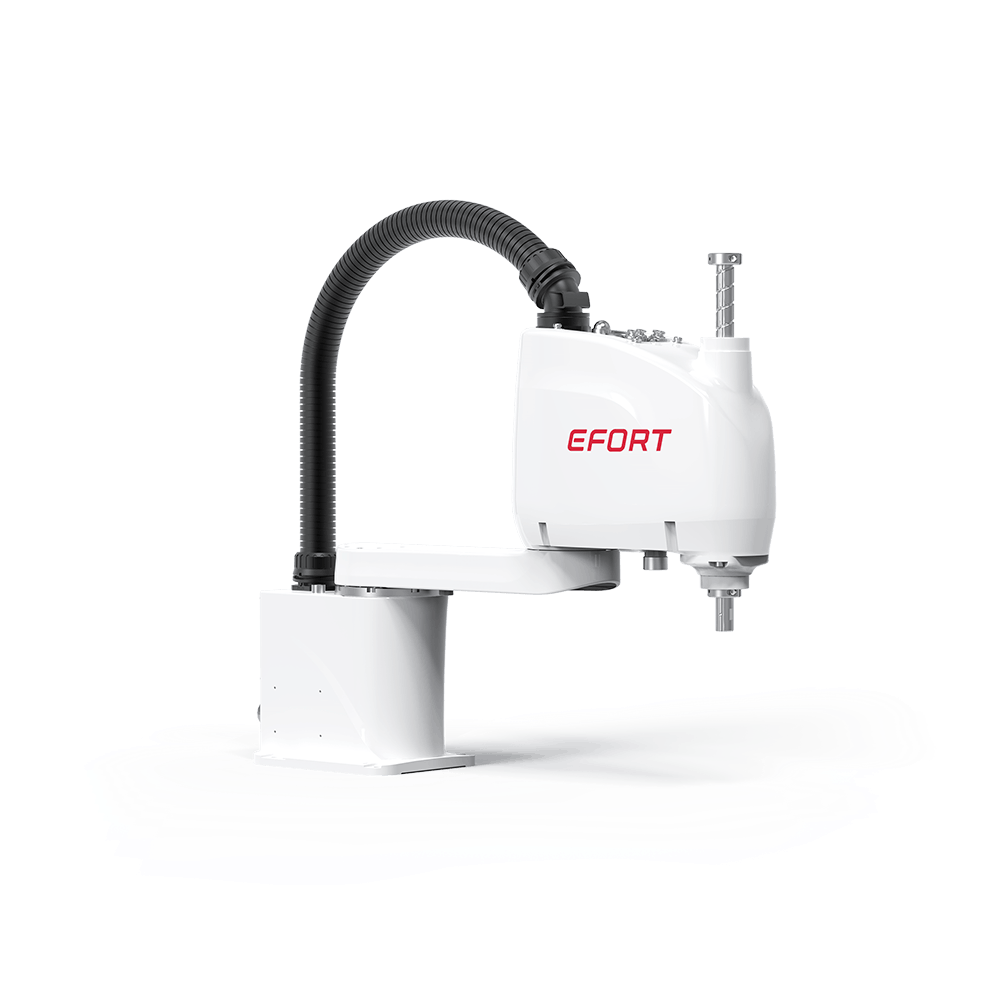
04
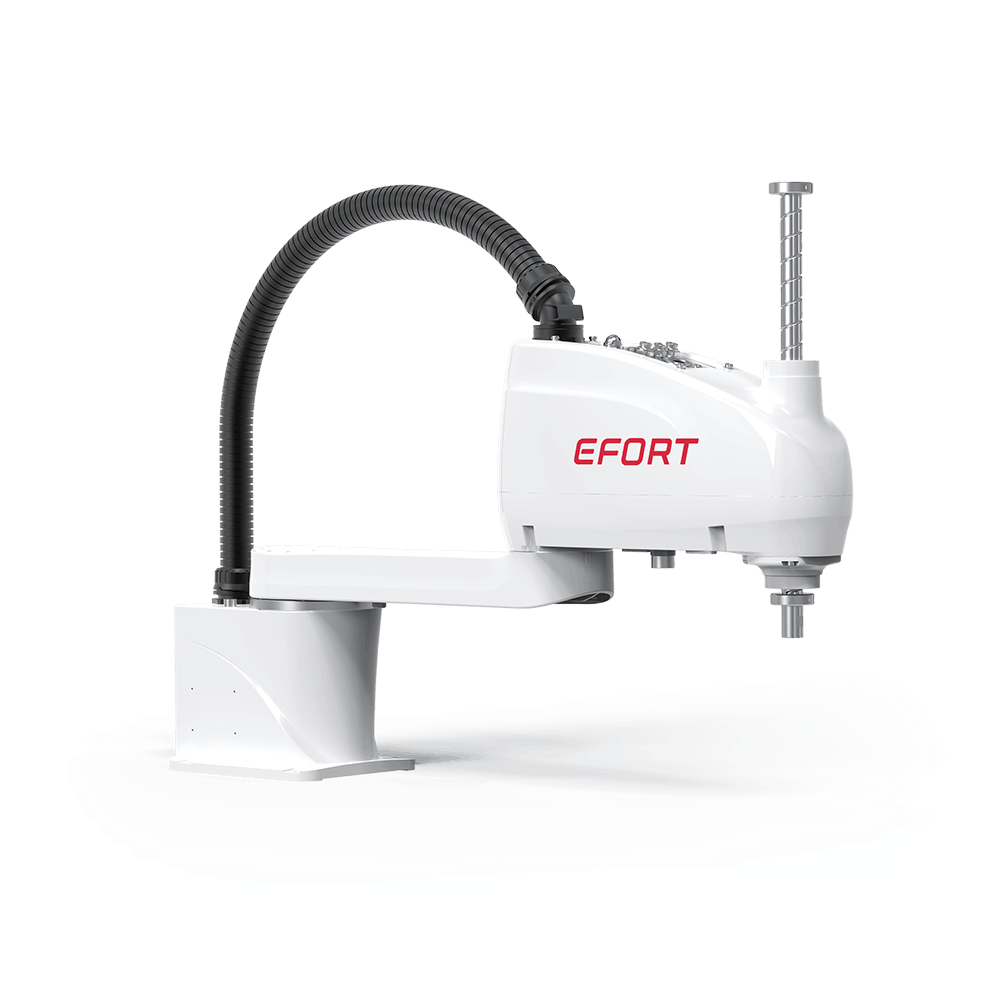
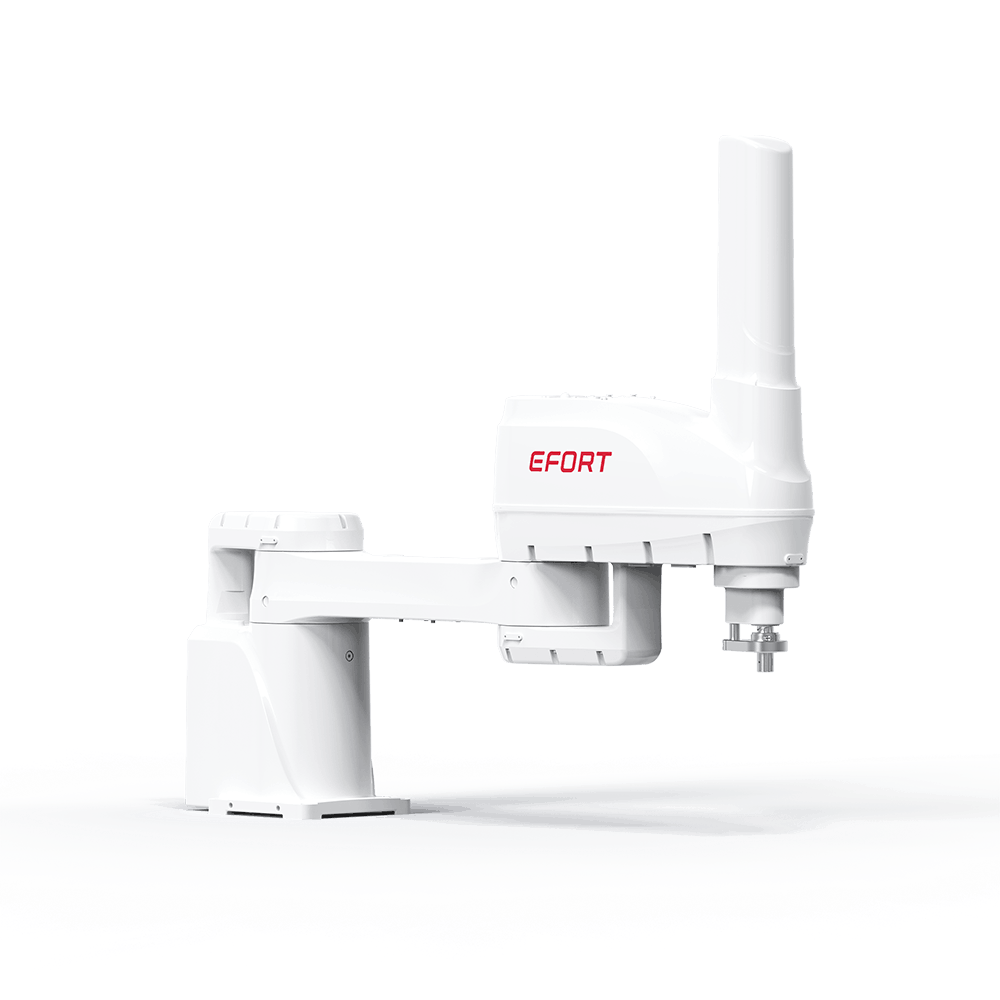
Specification
| Model | ESR30-1000Z42 | |
| Reach | 1000 mm | |
| Max.payload on wrist | ||
| Max.payload on wrist | Rated | 10 kg |
| Maximum | 30 kg | |
| Robot weight | 72 kg | |
| Maximum speed | ||
| Maximum speed | J1 + J2 | 10300 mm/sec |
| J3 | 1100 mm/sec | |
| J4 | 600°/sec | |
| Motion range | ||
| Motion range | J1 | +/- 145° |
| J2 | +/- 145° | |
| J3 | 420 mm | |
| J4 | +/- 360° | |
| Repeatability | ||
| Repeatability | J1 + J2 | +/- 0.025 mm |
| J3 | +/- 0.01 mm | |
| J4 | +/- 0.01° | |
| Standard cycle time | 0.38 s | |
| J4 allowable moment of inertia | ||
| J4 allowable moment of inertia | Rated | 0.6 kg•m² |
| Maximum | 1.2 kg•m² | |
| Electric lines | D-Sub 9-Pin+15-Pin | |
| Pneumatic lines | φ4 mmx2,φ6 mmx2 | |
| J3 downward force | 400 N | |
| Installation | Floor | |
| Installation enviroment | ||
| Installation enviroment | Ambient temperature | 5-40°C |
| Ambient humidity | RH≤80%(No dew nor frost allowed) | |
Contact us
Contact us
Efort robots offer an innovative approach to key industrial applications.