01
Highlights
Thanks to the new design of wrist, inertia and bearing capacity are increased by 25% with wider application scope;
Thanks to the high stiffness transmission design and advanced trajectory algorithm, the improved robot accuracy performance helps customers to face variety of application scenarios;
Lighter weight of the body, 20% less than its predecessor.
02
Applications
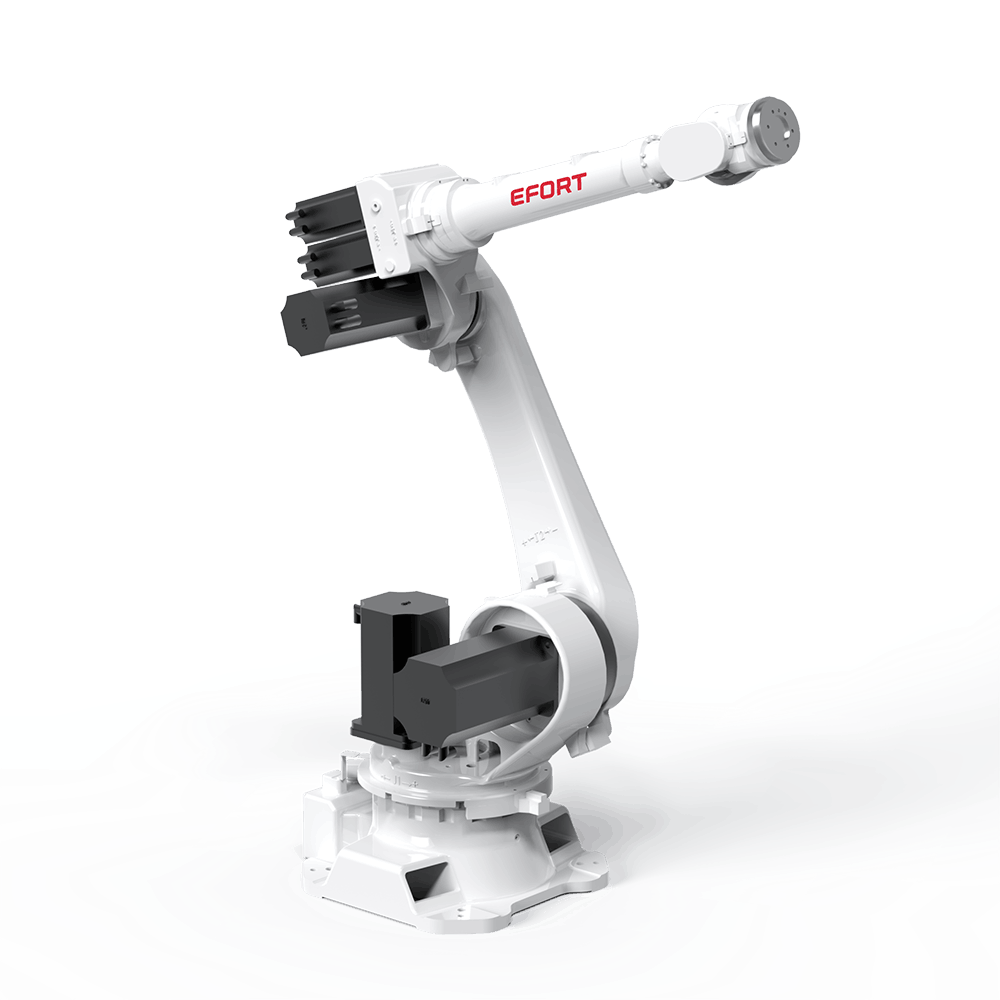
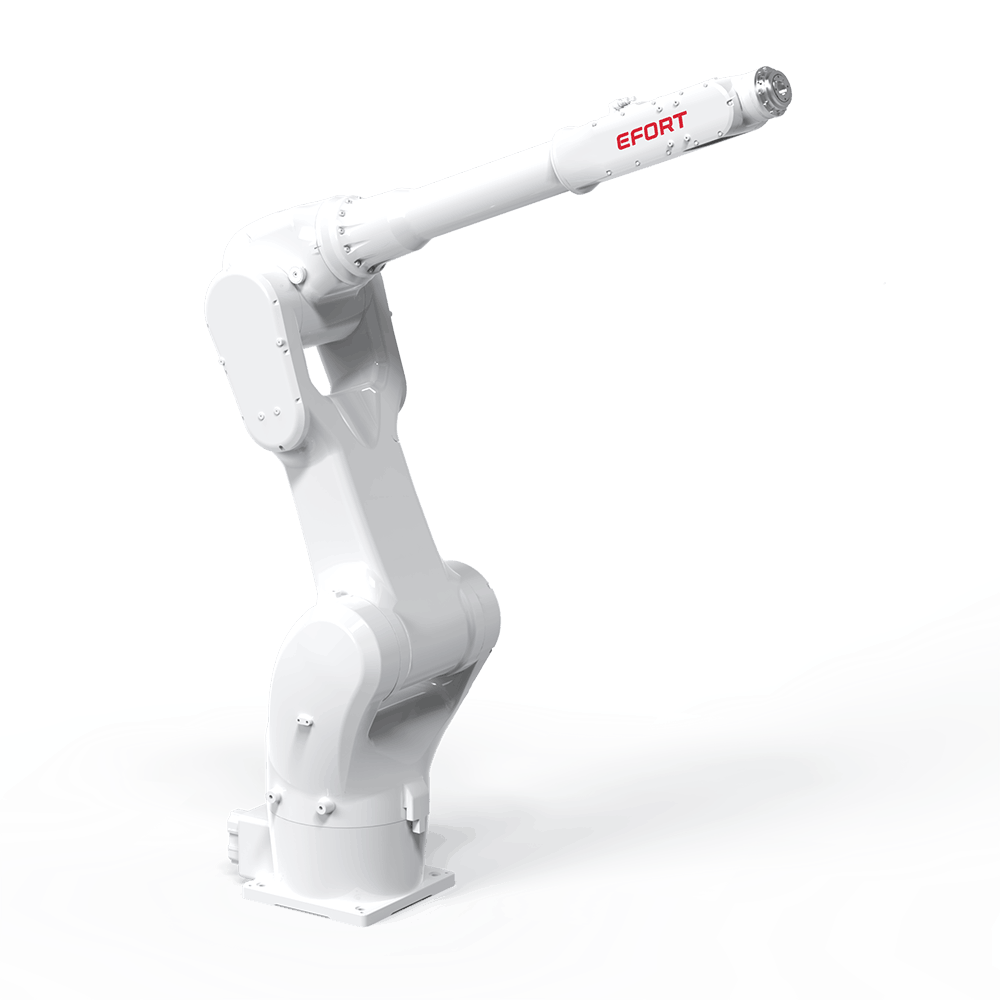
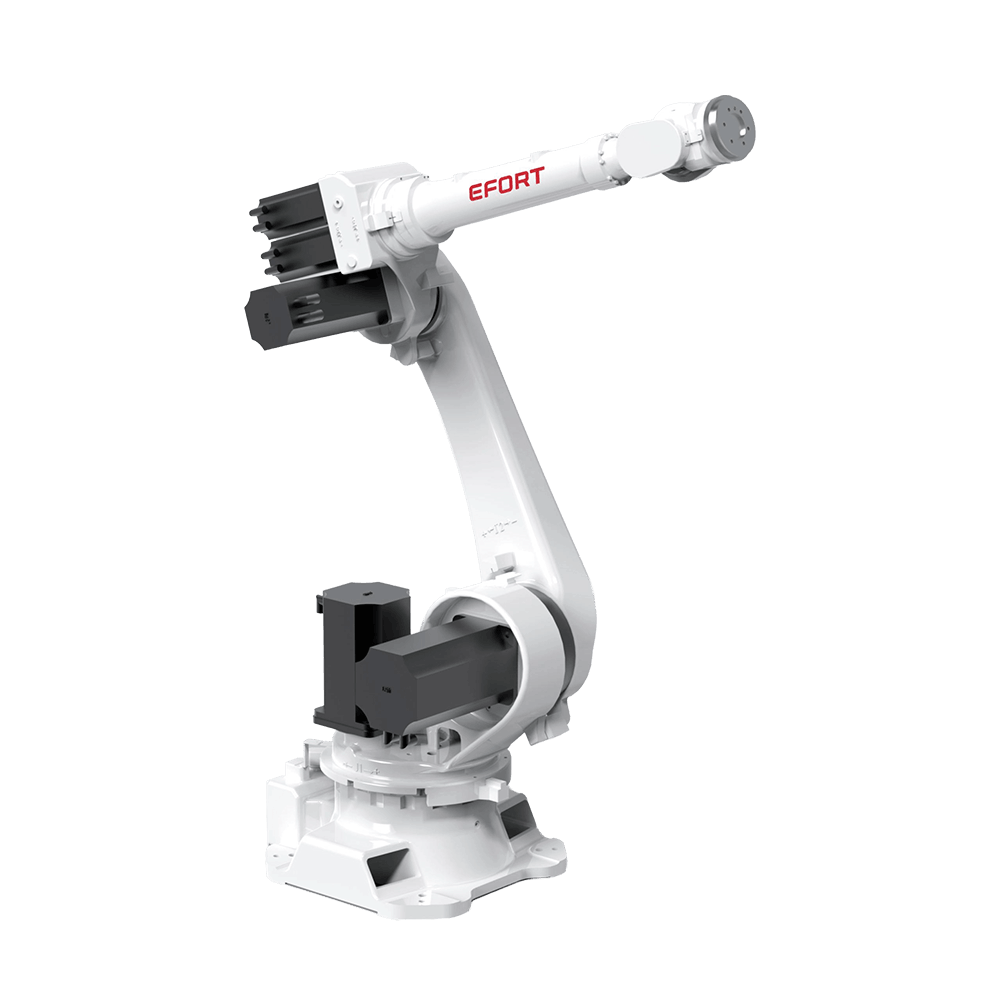
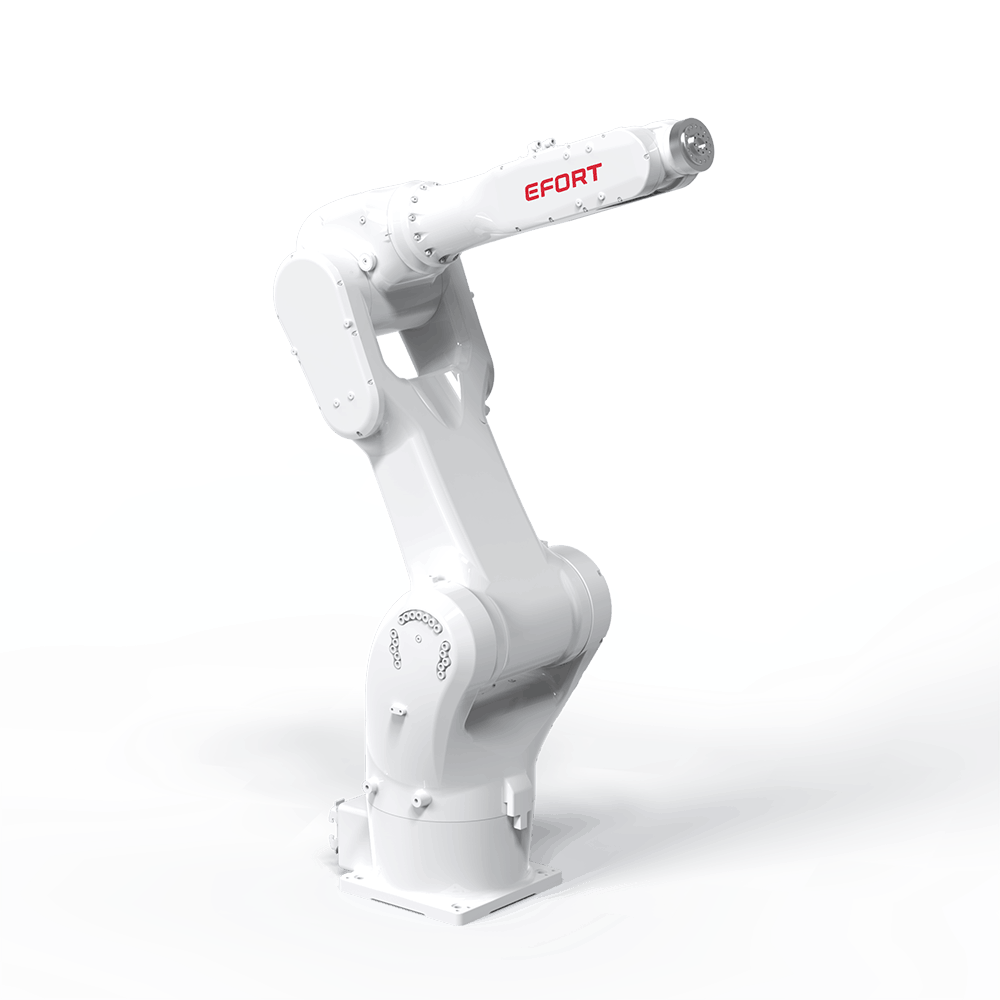
It can be used in handling operations, assembling, grinding, polishing, deburring, etc.
03
Industries
Suitable for metal parts, photovoltaic, logistics, food and beverage and other industries.
04
Specification
| Model | ER25-1600 | |
| Type | Articulated | |
| Controlled axes | 6 Axes | |
| Max. payload on wrist | 25 kg | |
| Repeatability | +/- 0.05 mm | |
| Robot weight | 215 kg | |
| Reach | 1665 mm | |
| Robot IP grade | IP54/IP67 (Wrist) | |
| Cabinet IP grade | IP20/IP54 (Optional) | |
| Drive mode | AC servo drive | |
| Installation | Floor, Upside-down, Wall | |
| Installation enviroment | ||
| Installation enviroment | Ambient temperature | 0~45 °C |
| Ambient humidity | RH≤80% (No dew nor frost allowed) | |
| Vibration acceleration | 4.9 m/s² (<0.5 G) | |
| Allowable load moment at wrist | ||
| Allowable load moment at wrist | J4 | 50 N • m |
| J5 | 50 N • m | |
| J6 | 30 N • m | |
| Allowable load inertia at wrist | ||
| Allowable load inertia at wrist | J4 | 2.2 kg • m² |
| J5 | 2.2 kg • m² | |
| J6 | 1.5 kg • m² | |
| Maximum speed | ||
| Maximum speed | J1 | 220°/sec |
| J2 | 180°/sec | |
| J3 | 200°/sec | |
| J4 | 360°/sec | |
| J5 | 360°/sec | |
| J6 | 410°/sec | |
| Motion range | ||
| Motion range | J1 | +/- 170° |
| J2 | + 77° / - 160° | |
| J3 | + 165° / - 85° | |
| J4 | +/- 190° | |
| J5 | +/- 130° | |
| J6 | +/- 360° | |
Contact us
Contact us
Efort robots offer an innovative approach to key industrial applications.