01
Highlights
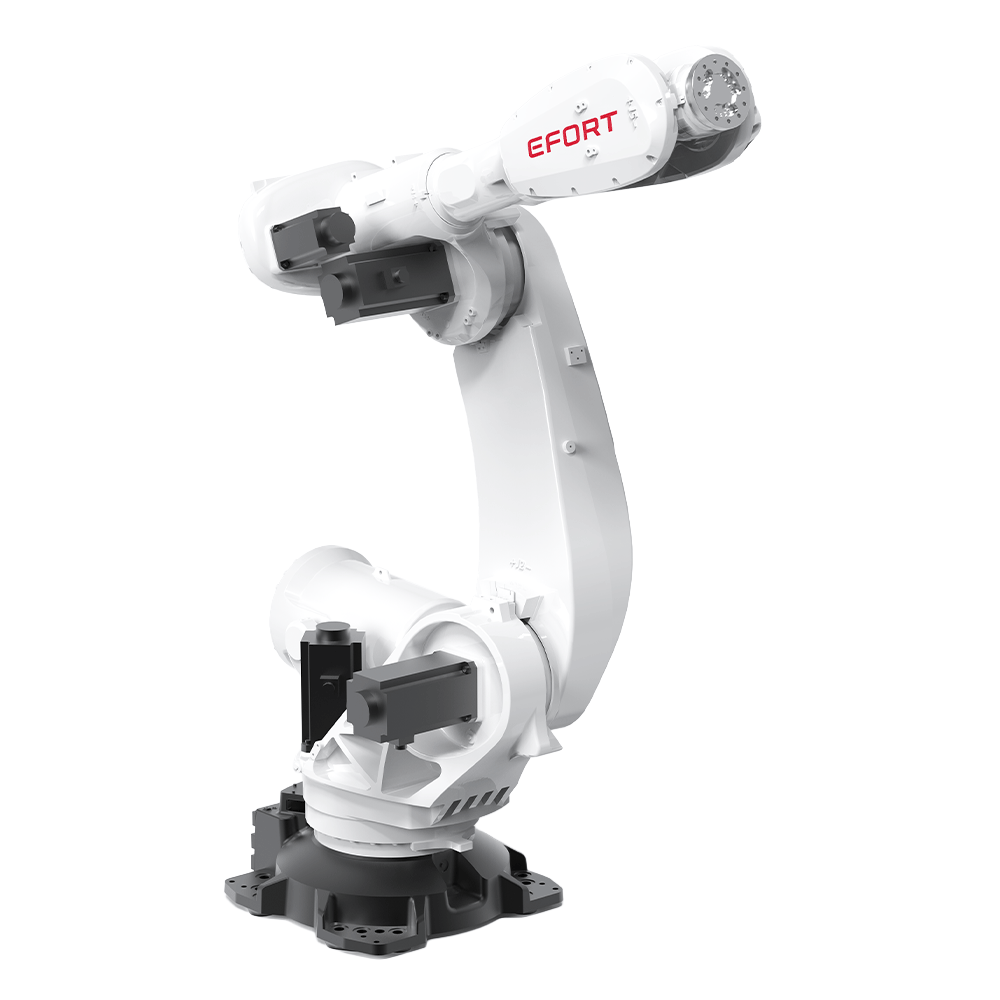
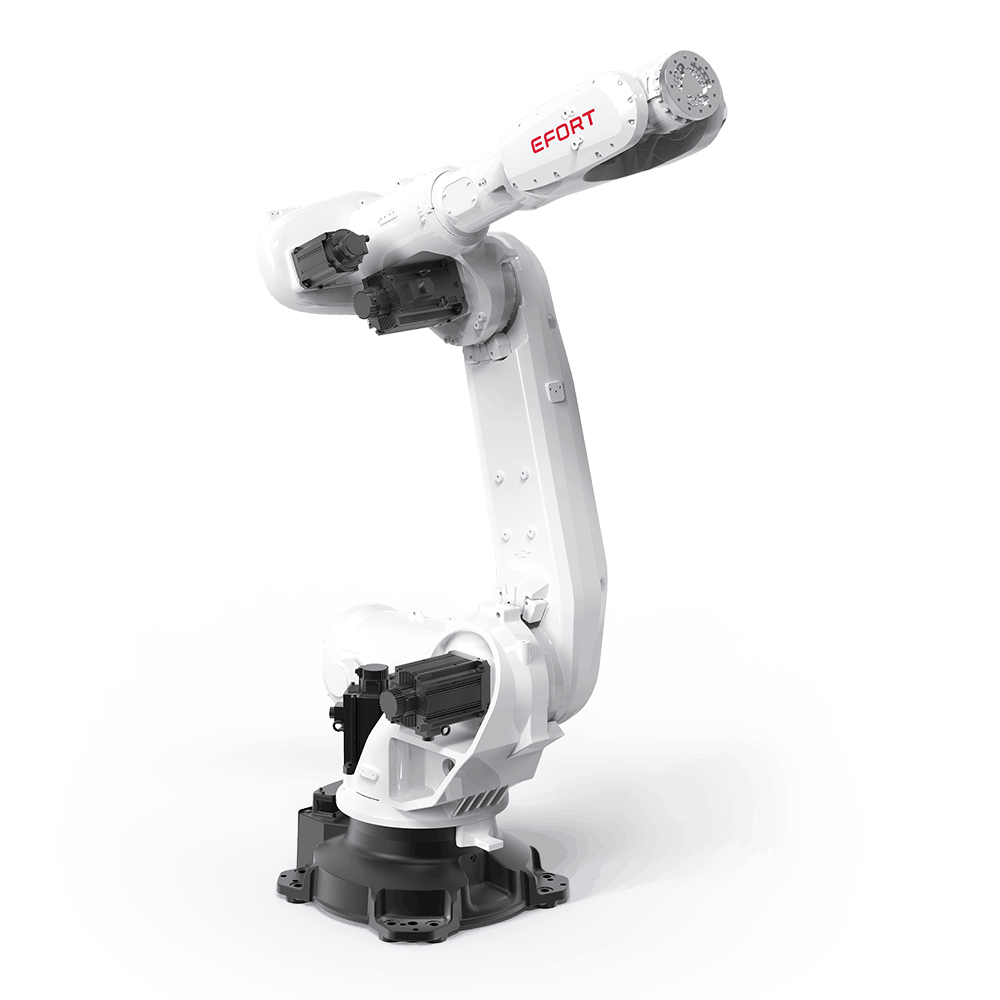
Platform-based products and modular design make customer spare parts management more flexible;
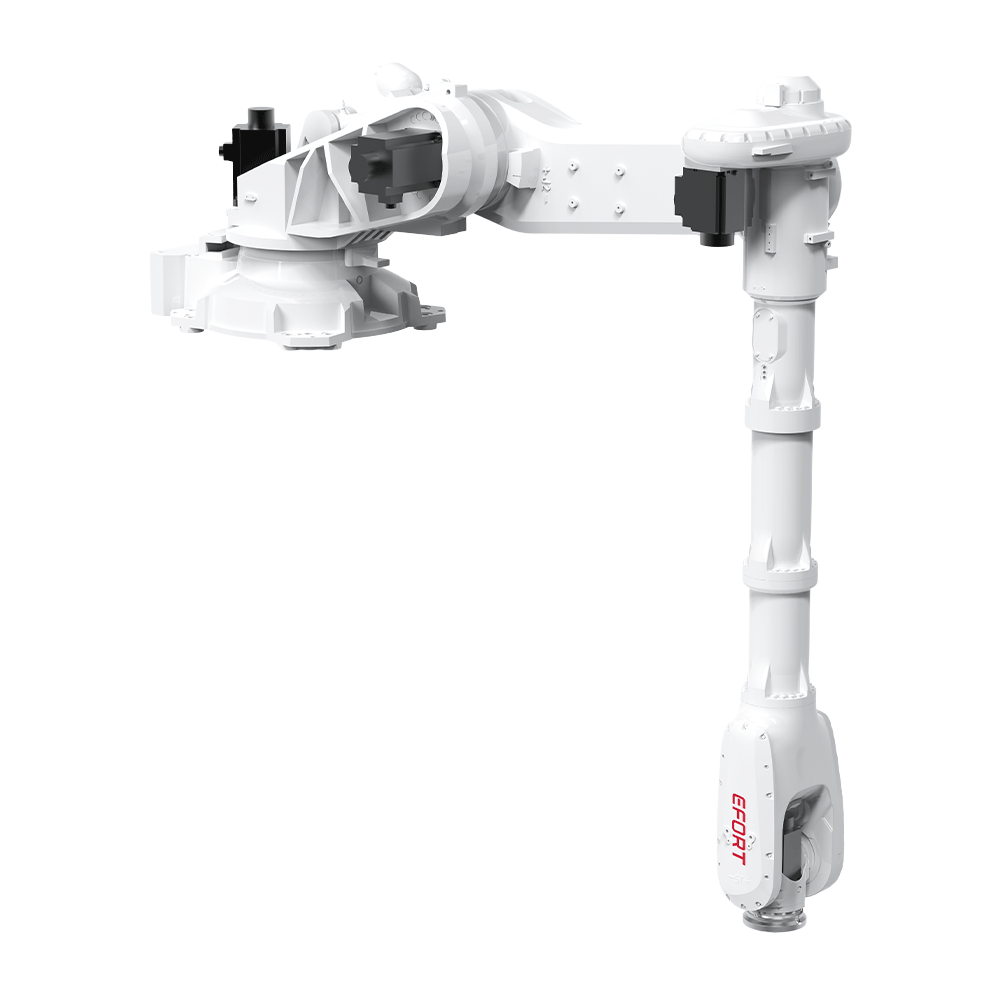
With a working radius of 3500mm and a maximum downward reach of 2567mm, the robot can flexibly access the interior of equipment to perform tasks such as part retrieval and cleaning;
The balance cylinder utilizes a nitrogen-liquid hybrid design, eliminating the need for nitrogen gas refilling, ensuring enhanced stability, improved durability, and an extended service life.
02
Applications
It can be applied to elevated platform scenarios, such as die casting and injection molding
03
Industries
Suitable for fields like automotive and home appliance manufacturing.
04
Specification
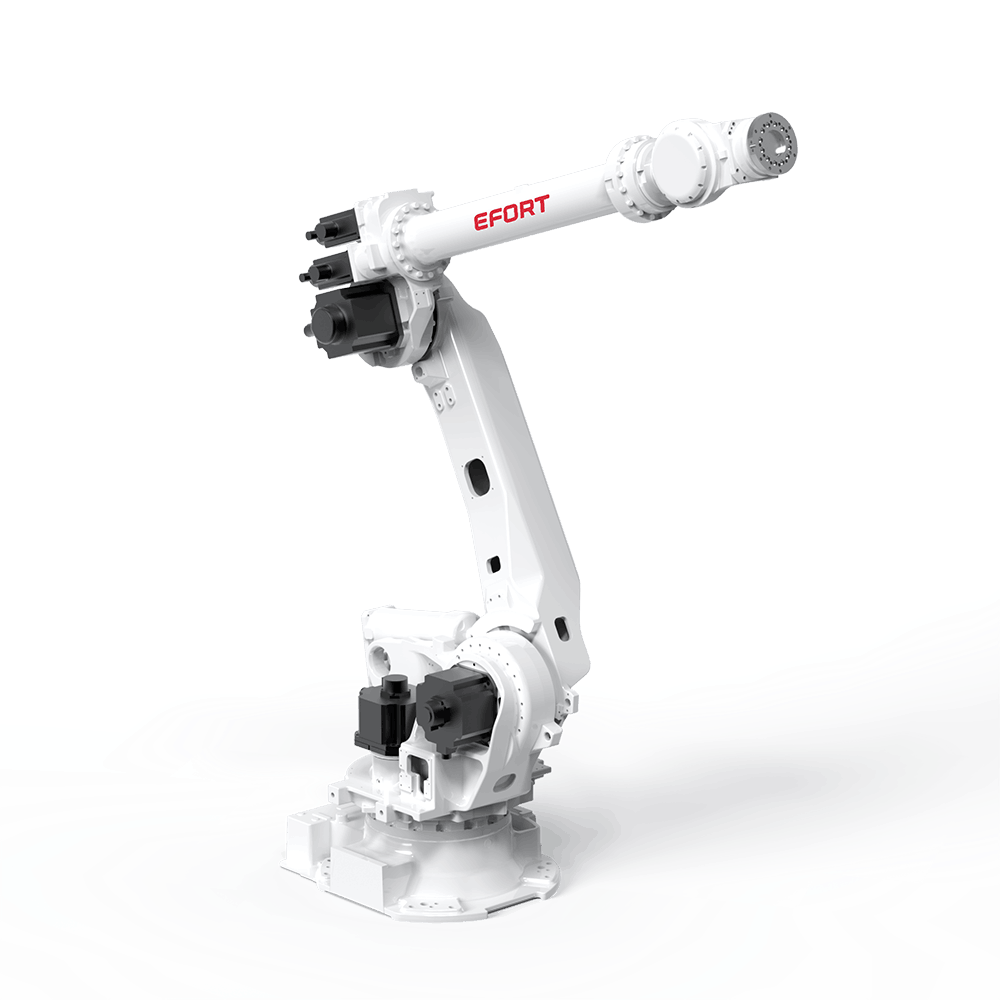
| Model | ER100P-3500 | |
| Type | Articulated | |
| Controlled axes | 6 Axes | |
| Max. payload on wrist | 100 kg | |
| Repeatability | +/- 0.1 mm | |
| Robot weight | 1315 kg | |
| Reach | 3502 mm | |
| Robot IP grade | IP65/IP67 (Wrist) | |
| Cabinet IP grade | IP54 | |
| Drive mode | AC servo drive | |
| Installation | Floor | |
| Installation enviroment | ||
| Installation enviroment | Ambient temperature | 0~45 °C |
| Ambient humidity | RH≤80% (No dew nor frost allowed) | |
| Vibration acceleration | 4.9 m/s² (<0.5 G) | |
| Allowable load moment at wrist | ||
| Allowable load moment at wrist | J4 | 1324 N • m |
| J5 | 1324 N • m | |
| J6 | 650 N • m | |
| Allowable load inertia at wrist | ||
| Allowable load inertia at wrist | J4 | 250 kg • m² |
| J5 | 250 kg • m² | |
| J6 | 185 kg • m² | |
| Maximum speed | ||
| Maximum speed | J1 | 130°/sec |
| J2 | 110°/sec | |
| J3 | 115°/sec | |
| J4 | 170°/sec | |
| J5 | 120°/sec | |
| J6 | 220°/sec | |
| Motion range | ||
| Motion range | J1 | +/- 185° |
| J2 | + 40° / - 160° | |
| J3 | + 180° / - 70° | |
| J4 | +/- 360° | |
| J5 | +/- 130° | |
| J6 | +/- 360° | |
Lorem ipsum
Contattaci
I robot Efort offrono un approccio innovativo alle principali applicazioni industriali.
Le nostre certificazioni
-

DIN EN ISO 9001:2015
-
DIN EN ISO 14001:2015
-

PN-EN ISO/IEC 27001:2023-08 (ISO/IEC 27001:2022)
-

PN-EN ISO 45001:2024-02
-
2527-CPR-1A.357.04
-
PN-EN ISO 3834-2:2021-09
-

ISO 9001:2015
-

BVI 19 ATEX 0003 Q rev. 04
-

CML 20ATEX1065X